



Научная проблема в области инновационного производства и ценообразования роторно-управляемых систем (далее – РУС) возникла в конце 20 века. Активные исследования по этой проблематике в зарубежной и отечественной литературе стали публиковаться с начала 21 века. Энергетическая стратегия до 2035 г. предусматривает новые способы и инновационные подходы в добыче нефти и газа [16]. В процессе испытаний роторно-управляемых систем [7] с ТМС такими экономически значимыми субъектами предпринимательской деятельности как ПАО «Татнефть», ПАО «ГАЗПРОМ» отмечаются недостатки конструкций в части телеметрии и навигационной составляющей. Отечественные производители роторно-управляемых систем должны учесть, что добыча полезных ископаемых в России и разработка скважин ведётся не только на юге страны, но и в условиях крайнего Севера. Сегодня датчики ускорения (акселерометры) и изменения направления (гироскопы) используются в разных сферах производства, в том числе в ОПК, как технология двойного назначения [14] (роботостроение, телеметрия, авиастроение, приборостроение). Но, как известно, каждый прибор имеет свои погрешности в работе, которые происходят при смене температурного режима, местоположения, вибрациях, погружениях и так далее. Следует отметить, что уже произошло утверждение средств измерений [15], получен сертификат от компании ТМС РУС [15]. В этой связи учёные должны работать над решением научной проблемы по управлению и минимизацией ценовой составляющей акселерометров и гироскопов.
Степень изученности материалов исследования
Тема научной статьи является популярной среди отечественных учёных: Г.В. Максюшин, Н.С. Соболева рассматривали учёт погрешностей МЭМС-акселерометра при его моделировании [1, С. 1-5]; В.В. Матвеев проводил инженерный анализ погрешностей бесплатформенной инерциальной навигационной системы [2, С. 251-267]; Д.В. Павлов, К.Г. Лукин, М.Н. Петров разработали имитационную модель MEMS-акселерометра в среде SIMULINK [4, С. 28-33]; С.В. Пономарева, В.С. Кутузова, А.А. Павлович провели расчёт погрешностей при работе бесплатформенной инерциальной навигационной системы на подвижных объектах [5, С. 92-99]; В.И. Розенблит, В.Л. Буряковский, Е.Ф. Фитерман, У.Л. Гудман анализировали елеметрическую систему [6]; О.С. Салычев представил способ определения навигационных параметров бесплатформенной инерциальной навигационной системой [8]; Г.В. Сергеев провёл сследование вопросов построения телеметрических систем, использующих в качестве прототипа поднесущих колебаний некоторые системы ортогональных функций [9, С. 25-250]; Д.С. Силантьев представил модель ошибок бесплатформенной инерциальной навигационной системы летательного аппарата [10, С. 17-24]; В.М. Терешков применил прямой метод оценивания погрешностей датчиков инерциально-спутниковой навигационной системы [11, С. 8-16]; А.Н. Ткаченко, Д.Ю. Ларионов, Л.Н. Подгорная, Р.В. Шалымов построили модель для исследования алгоритмов работы инерциальных измерительных систем [12]; М.С. Турбаков, А.А. Мелехин, С.Н. Кривощеков, А.А. Щербаков представили телеметрическую систему мониторинга ствола скважины [13]; А.А. Хачатурян, С.В. Пономарева, Е.С. Силиназанимались повышением качества промышленного производства путем компенсации влияния температуры на выходные параметры акселерометра в бесплатформенной инерционной навигационной системе [17, С. 14]; Ю.Н. Челноков, С.Е. Переляев, Л.А. Челнокова проводили исследование алгоритмов определения инерциальной ориентации движущегося объекта [18]; С.А. Черенков, А.А. Лисин представили способ определения навигационных параметров и бесплатформенная инерциальная навигационная система для его осуществления [19]; В.П. Чупров, Д.А. Будаев изучили устройство для фиксации забойного блока телеметрической системы в ориентирующем переводнике бурильной колонны [20].
В таблице 1 рассмотрим характеристики современных программных продуктов, которые помогают отечественным учёным решать сложные математические и технические задачи.
Из таблицы 1 следует, что ведущие научные школы Российской Федерации используют в процессе управления погрешностями в работе БИНС (акселерометров и гироскопов) такие современные программные продукты как: Scilab, Matcat и среду SIMULINK.
Таблица 1
Характеристики современных программных продуктов, позволяющих решать сложные технические и научные задачи. [Источник: составлено автором по [1, 2, 3, 4, 5, 17]
|
№ п/п |
Наименование программного продукта |
Краткая характеристика программного продукта или среды |
Научный труд, созданный при помощи современного программного продукта или среды |
Научная школа (наименование высшего учебного заведения) |
|
1 |
Simulink |
Среда динамического междисциплинарного моделирования сложных технических систем и основной инструмент для модельно-ориентированного проектирования |
Разработка имитационной модели MEMS-акселерометра в среде SIMULINK [4] |
Новгородский государственный университет [4] |
|
2 |
Мatlab |
Среда и язык технических расчётов для решения инженерных и научных задач любой сложности в любых отраслях. |
1. Инженерный анализ погрешностей бесплатформенной инерциальной навигационной системы [1]. 2. Учёт погрешностей МЭМС-акселерометра при его моделировании [2] |
1) Тульский государственный университет. 2) МГТУ им. Н.Э. Баумана. |
|
3 |
Scilab [3] |
Пакет прикладных математических программ, для инженерных (технических) и научных расчётов |
Повышение качества промышленного производства путем компенсации влияния температуры на выходные параметры акселерометра в бесплатформенной инерционной навигационной системе. |
Институт проблем рынка РАН [17] и ФГБОУ ВО «ПНИПУ» [5]. |
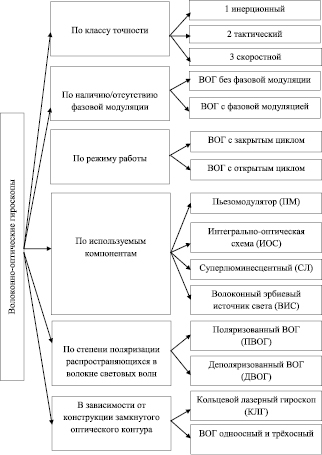
Рис. 1. Классификация волоконно-оптических гироскопов [Источник: составлена автором]
Таблица 2
Свойства, достоинства и недостатки работы волоконно-оптических гироскопов (ВОГ) [Источник: составлено автором]
|
№ п/п |
Основные свойства ВОГ |
Основные достоинства ВОГ |
Основные недостатки ВОГ |
Проблемы, требующие научных решений |
|
1 |
Высокая чувствительность прибора |
Высокая чувствительность Отсутствие подвижных частей |
Погрешности в точности и стабильности показаний ВОГ |
Поиск методов компенсации сигналов, не связанных с вращением (цель – увеличение точности и стабильности показаний ВОГ) |
|
2 |
Малые габариты и масса конструкции |
Простота конструкций |
Быстрая реакция на изменения рынка по производству ВОГ |
Миниатюризация |
|
Окончание табл. 2 |
||||
|
№ п/п |
Основные свойства ВОГ |
Основные достоинства ВОГ |
Основные недостатки ВОГ |
Проблемы, требующие научных решений |
|
3 |
Невысокая стоимость производства и конструирования |
Короткое время запуска |
Зарубежные конкуренты (Япония и Германия) |
Снижение стоимости готового продукта |
|
4 |
Большой динамический диапазон измеряемых угловых скоростей |
Отсутствие подвижных частей |
Шум при работе ВОГ и обработке информации |
Снижение шума |
|
5 |
Отсутствие вращающихся механических элементов (роторов) и подшипников |
Высокая линейность характеристик |
Погрешности в работе ВОГ: месторасположение; |
Уменьшение погрешностей в работе ВОГ |
|
6 |
Практически мгновенная готовность к работе |
Низкая потребляемая мощность |
Ошибочные сигналы |
Алгоритмы для выделения и фильтрации ошибочных сигналов |
|
7 |
Нечувствительность к большим линейным ускорениям |
Высокая надёжность |
Х |
Х |
|
8 |
Стойкость к большим перегрузкам |
Стойкость к большим перегрузкам |
Потеря ВОГ в процессе эксплуатации |
Риск потери ВОГ |
|
9 |
Долгий срок службы |
Долгий срок службы |
Устаревание прибора |
ВОГ требует постоянной модернизации |
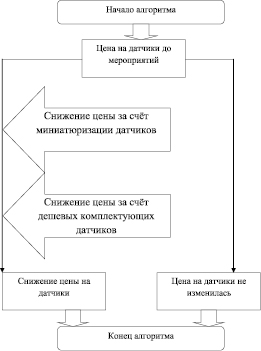
Рис. 2. Алгоритм по снижению цены на датчики (акселерометры и гироскопы) для предприятий ОПК
Рассмотрим в таблице 2 свойства, достоинства и недостатки работы волоконно-оптических гироскопов.
Из данных представленных в таблице 2 следует, что основной проблемой является риск потери волоконно-оптического гироскопа, а также, что ВОГ требует постоянной модернизацией в связи с научно-техническим прогрессом. Самой важной проблемой остаётся миниатюризация датчиков и ценовая составляющая акселерометров и гироскопов. На рисунке 2 представим авторский взгляд на решение проблемы снижения цены на датчики на предприятиях ОПК.
Из данных представленных на рисунке 2 следует, что основными путями для снижения цены на датчики являются: миниатюризация самого датчика (акселерометра, гироскопа); включение в конструкторскую часть более дешевых комплектующих.
Заключение
Отечественные и зарубежные учёные заинтересованы в развитии конструкторской части роторно-управляемых систем, телеметрических систем, а также датчиков (акселерометров и гироскопов).
Анализ схемотехнических характеристик показал, что телеметрические системы и их составляющие миниатюризируются. Основным из аспектов, которые требуют особого внимания, авторы научных трудов называют: «цену готового продукта», так как технологии двойного назначения должны быть конкурентоспособны на мировом рынке. Цена телеметрической системы должна снижаться, но, при этом погрешности в работе системы управления минимизируются.
Библиографическая ссылка
СЕВЕРЮХИН А.М. СНИЖЕНИЕ ЦЕНЫ МАШИНОСТРОИТЕЛЬНЫМИ ПРЕДПРИЯТИЯМИ НА ТОВАРЫ ДВОЙНОГО НАЗНАЧЕНИЯ ДЛЯ ПРОИЗВОДСТВЕННЫХ НУЖД НЕФТЕГАЗОВОГО КОМПЛЕКСА РОССИИ (НА ПРИМЕРЕ АКСЕЛЕРОМЕТРОВ И ГИРОСКОПОВ) // Вестник Алтайской академии экономики и права. 2020. № 8-2. С. 294-300;URL: https://vaael.ru/ru/article/view?id=1288 (дата обращения: 11.07.2026).
DOI: https://doi.org/10.17513/vaael.1288